// load in the Zephyr library#include <zephyr/drivers/pwm.h>// define structs based on DT aliasesstaticconststruct pwm_dt_spec pwm1 = PWM_DT_SPEC_GET(DT_ALIAS(pwm1));staticconststruct pwm_dt_spec pwm2 = PWM_DT_SPEC_GET(DT_ALIAS(pwm2));// check that the PWM controller is readyif(!pwm_is_ready_dt(&pwm1)){ LOG_ERR("PWM device is not ready.");return-ENODEV;}// set the PWM duty cycle (pulse length)err = pwm_set_pulse_dt(&pwm1, pwm1.period/2);// 50% duty cycle (be careful with integer division)if(err){ LOG_ERR("Could not set pwm1 driver [%d].", err);// maybe change to an ERROR state}
Changing PWM Duty Cycle
The pulse length (duty cycle) can be changed “on the fly”, but only changes at the next period.
Can be done with a timer or triggered by an event or poll signal.
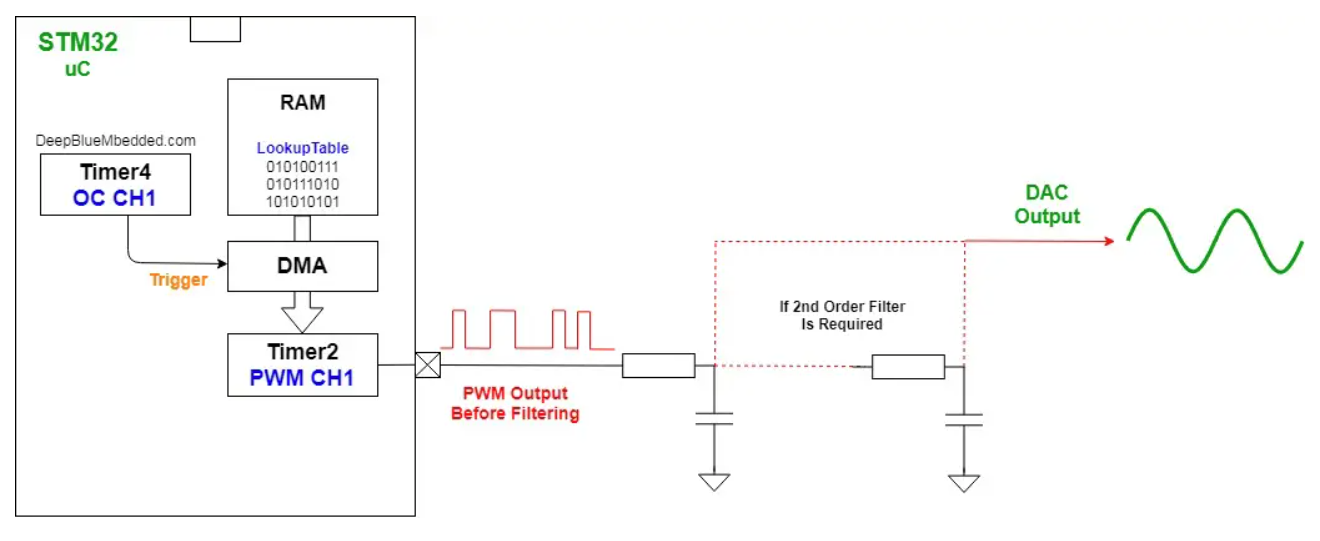
How to Sinusoidally Module LED Brightness Using a PWM
Change the duty cycle of the PWM signal at a known timing interval. Can be done with a timer, callback function run at a set interval (e.g., ADC async), etc.
Need to consider how often to update based on frequency content of the desired output signal.
PWM clock frequency should be much higher than the output signal frequency.
LPF to smooth out PWM clock frequency-based transitions.